Corotational02#
The corotational coordinate transformation allows small-strain frame elements to be employed in a large deformation analysis. [1] [2] Corotational02 superceeds the original Corotational transformation, which is now deprecated.
- Model.geomTransf("Corotational02", tag, vecxz[, offi, offj])
Define a corotational geometric transformation for frame elements.
- Parameters:
- tag: integer
integer tag identifying transformation
- vecxz: tuple of floats
X, Y, and Z components of vecxz, the vector used to define the local x-z plane of the local-coordinate system, required in 3D. The local y-axis is defined by taking the cross product of the vecxz vector and the x-axis.
- offi: tuple of floats
joint offset values – offsets specified with respect to the global coordinate system for element-end node i (optional, the number of arguments depends on the dimensions of the current model).
- offj: tuple of floats
joint offset values – offsets specified with respect to the global coordinate system for element-end node j (optional, the number of arguments depends on the dimensions of the current model).
- geomTransf Corotational02 $tag < $vecxzX $vecxzY $vecxzZ > <-jntOffset $dXi $dYi $dZi $dXj $dYj $dZj>
Argument |
Type |
Description |
|---|---|---|
$tag |
integer |
integer tag identifying transformation |
$vecxzX $vecxzY $vecxzZ |
float |
X, Y, and Z components of vecxz, the vector used to define the local x-z plane of the local-coordinate system. The local y-axis is defined by taking the cross product of the vecxz vector and the x-axis. These components are specified in the global-coordinate system X,Y,Z and define a vector that is in a plane parallel to the x-z plane of the local-coordinate system. These items need to be specified for the three-dimensional problem. |
$dXi $dYi $dZi |
float |
joint offset values – offsets specified with respect to the global coordinate system for element-end node i (optional, the number of arguments depends on the dimensions of the current model). |
$dXj $dYj $dZj |
float |
joint offset values – offsets specified with respect to the global coordinate system for element-end node j (optional, the number of arguments depends on the dimensions of the current model). |
Note
The element coordinate system and joint offsets are the same as that documented for the Linear transformation.
Examples#
Theory#
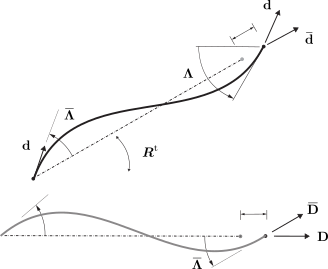
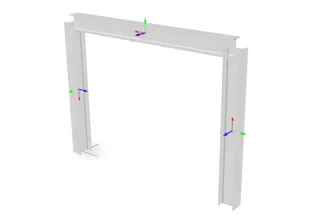
Corotational transformation of a two-node frame element.#
Under a corotational transformation, an element’s state determination is performed in a transformed configuration space represented by director fields \(\left\{\bar{\mathbf{d}}_k\right\}\), and \(\left\{\bar{\mathbf{D}}_k\right\}\) with the expressions:
Note
It is more appropriate to think of the corotational transformation as a family of transformations.
References#
Code Developed by: Remo Magalhaes de Souza, Claudio M. Perez